3D mesh segmentation
Analyze and partition indoor 3D spaces into 200 different classes, using transformers!
Point-cloud segmentation, or “cloudseg” for short, was one of the more challenging projects at Luxolis. The idea was relatively simple though.
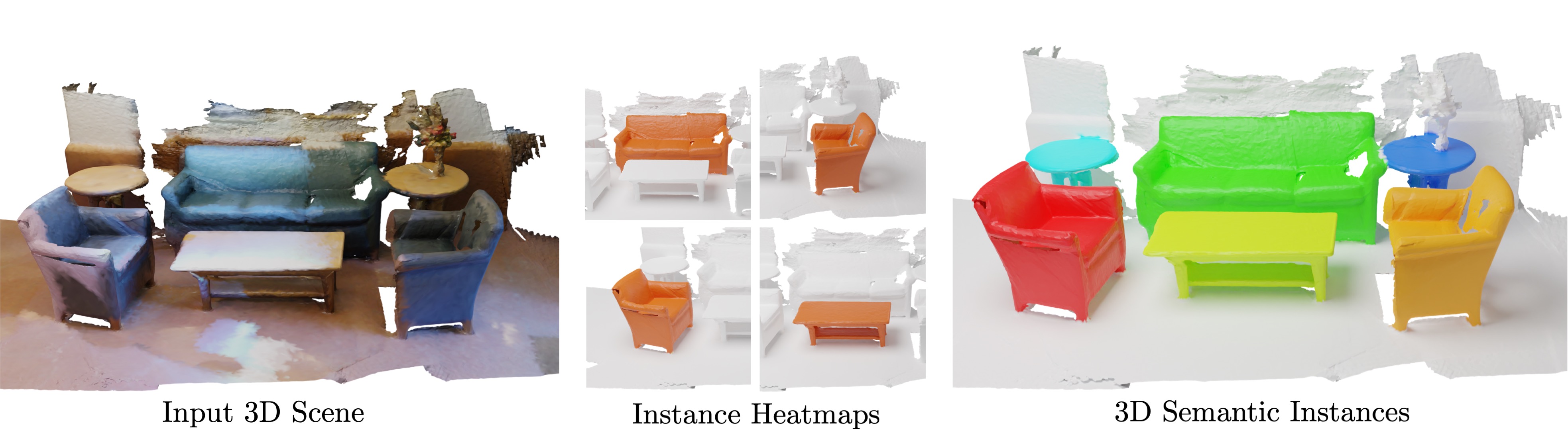
You are given a colored 3D mesh reconstruction of an indoor space (e.g. a living room). You are to assign each vertex the following labels: class label, instance label, and part label.
Let’s get to the example of a living room. The first stage - class label - assigns each vertex (a point in space), one of the predetermined classes (wall, floor, ceiling, chair, etc.). The second stage is actually determining which two points sharing the same class, actually are two different objects.
 SoftGroup segmentation
SoftGroup segmentation
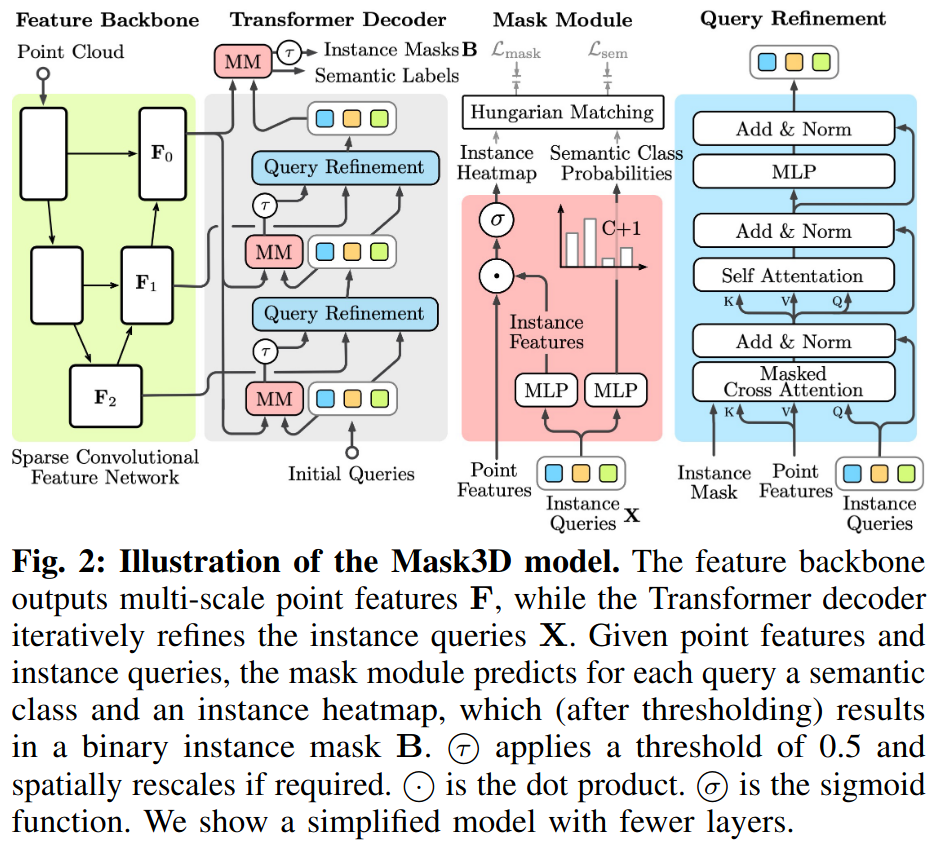
 Mask3D segmentation
Mask3D segmentation
A Live demo
Follow the instructions down below in order to generate 3D point cloud segmentation, works both indoors and outdoors. Make sure to use the supported 3D point cloud formats, and to orient the cloud correctly (z-axis points towards positive vertical direction).